 臺大首頁
臺大首頁 臺大校訊首頁
臺大校訊首頁 校訊投稿
校訊投稿
臺大研究成果系列報導-工學院 Taiwan Bot:具高動態平衡的智慧人形機器人
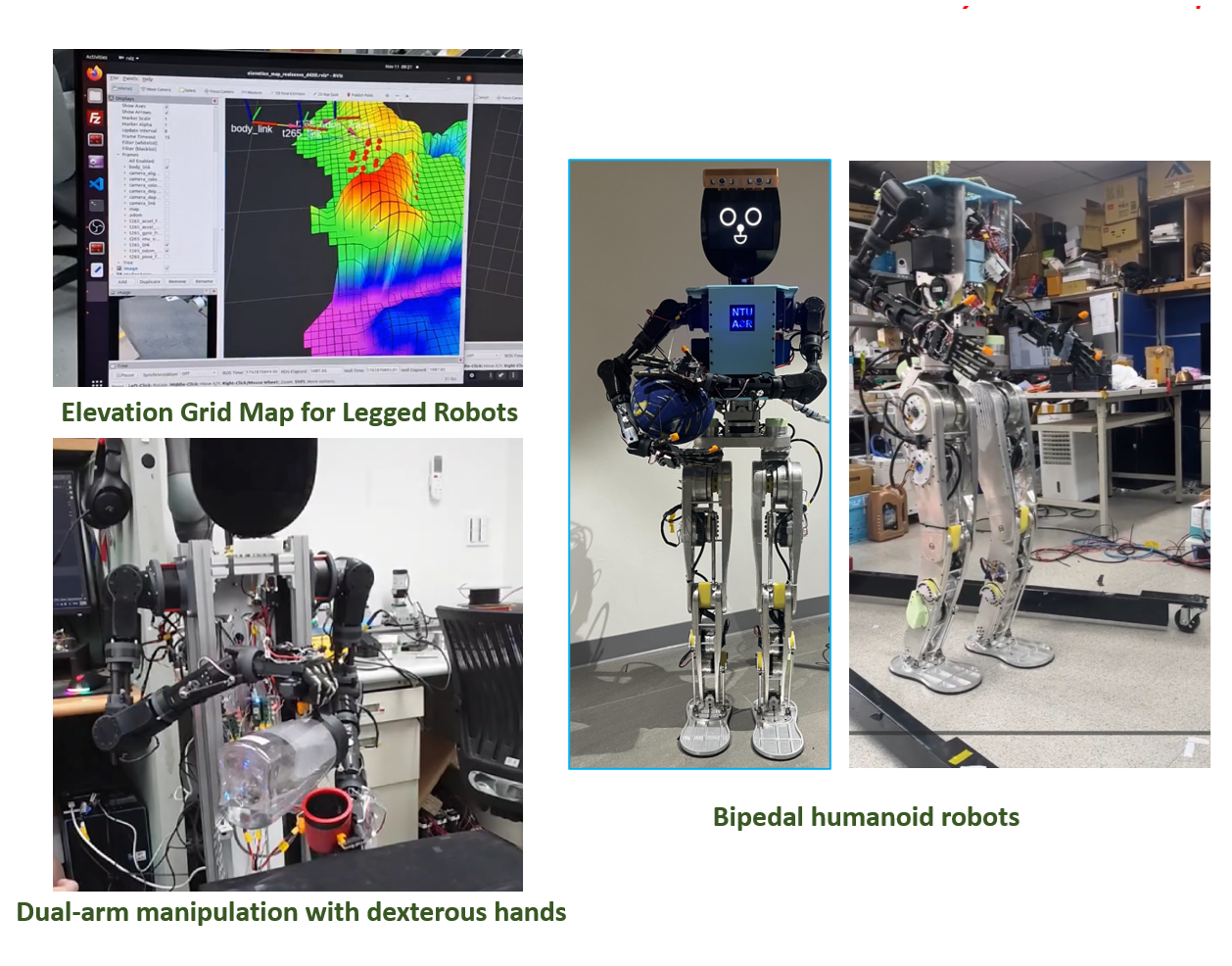
臺大機械系郭重顯教授團隊的研究,聚焦於具備高動態平衡能力與自主導航功能的全尺寸雙足人形機器人設計。此款機器人 (Taiwan Bot) 高度170公分、體重約65公斤,團隊針對其硬體機構與 AI 演算法提出了多項創新設計。
下肢動力與動態平衡控制
首先,研究採用「質量集中式」設計理念,將膝關節與踝關節的驅動馬達集中配置於大腿與髖關節附近,並透過多連桿機構進行驅動。此設計能有效降低下肢末端慣性,使整體動力學特性更趨近於倒單擺模型(Inverted Pendulum Model),不僅提升了機器人的動態反應能力,亦大幅減輕控制器即時運算時的計算負荷。
其次,該研究創新地將「反作用輪」架設於機器人腹腔位置,藉由其轉動產生的反作用力矩提供即時平衡補償,有效抵抗外部擾動。同時,團隊提出「平衡點可調式控制演算法」,透過動態調整系統平衡參考點,避免反作用輪瞬間輸出過大扭矩,進而提升系統穩定性。
在步行控制方面,團隊以3維線性倒單擺模型 (3D-LIPM) 為基礎規劃質心軌跡,並深入分析虛擬質心高度對行走穩定性的影響;同時整合支撐腳落地點規劃、擺動腳軌跡設計及轉向步態規劃,使機器人能順利完成前進、轉向等多樣化動作。
上肢設計與視覺導向操作
在上肢系統方面,團隊開發出單手具 7 個自由度 (DOF) 的雙手臂結構 (共 14 DOF) ,使其運動形式貼近人類肩、肘與腕部特性,並結合頭部的雙目立體視覺系統進行物體辨識與空間定位。控制策略則採用基於雅可比矩陣 (Jacobian Matrix) 的追蹤控制演算法,使雙手臂能即時修正末端執行器軌跡,完成協調式操作任務。
此外,團隊針對「仿生靈巧手」進行深入研究,採用欠驅動設計,透過 6 顆馬達與拉線機構控制手掌上的 16 個自由度,兼顧結構簡化與抓握包覆性。同時,團隊自行研發「液態金屬壓力感測器」以即時量測手掌接觸力分佈。實驗顯示,該靈巧手可穩定抓握衛生紙、球體、圓柱體等不同材質物品,並成功與雙臂系統整合,完成自主倒水等複雜任務。
全身整合與感知協同
在頸椎系統方面,團隊結合連續體機器人 (Continuum Robot) 概念,研發出仿人頸椎與雙眼定位系統。頸椎採用矽膠與鎳鈦合金的複合骨幹結構,可實現全向彎曲;雙目視覺系統具 2 個自由度,並整合物件辨識、視線追蹤與空間定位功能。
最終,透過整合雙足、頸部、雙手臂與靈巧手,研究團隊成功建立全尺寸人形機器人控制平台,實現行走、操作與抓握的穩定協同控制,展現了卓越的全身動作與感知整合能力。

您是網頁從1999.3.14 以來第 位使用者!
【版權所有】 本校刊著作權屬國立臺灣大學。未經允許不得以任何形式轉載。
Copyright (c) 1999 - 2001 National Taiwan University ALL RIGHTS RESERVED