 臺大首頁
臺大首頁 臺大校訊首頁
臺大校訊首頁 校訊投稿
校訊投稿
臺大工學院赴加交流:攜手 UBC 與溫哥華港 深化智慧港埠與數位雙生技術研發
為推動臺灣智慧港口技術發展,臺大工學院院長江茂雄日前率領「臺大無人載具研發設計中心」與機械工程學系師生團隊赴加拿大溫哥華,與英屬哥倫比亞大學(UBC)進行學術交流,並實地參訪港埠場域。
此次行程配合機械系教授詹魁元主持的國科會「前瞻技術產學合作計畫-貨櫃場站載具智動化與自主化之數位雙生跨平台協同研發計畫」推動。團隊與 UBC 應用科學院、UBC Smart Structures Research Group,以及此計畫的國際合作窗口 Tony Yang 教授團隊進行深度對接,雙方聚焦於智慧結構、數位雙生、場域驗證、港口自動化與大型載具自主化等核心議題,期望透過跨國學術與技術討論,強化臺灣在大型載具自動化與智慧港埠系統整合上的研發能量。
實地考察溫哥華港,評估自動化與載具調度實務
在兼顧理論與實務的原則下,臺大團隊前往溫哥華港的 Port of Vancouver Discovery Centre 與 Centerm 貨櫃碼頭進行實地考察,了解溫哥華港的營運模式、港區管理、載具調度、場域安全與自動化實際需求。行程中,團隊亦拜訪駐溫哥華臺北經濟文化辦事處,交流臺加雙邊在學術與產業合作上的發展。透過成熟港埠的實地觀察,更全面地掌握作業流程、系統部署與跨單位協作的實務經驗,作為臺灣後續推動智慧港口與自動化場站的重要參考。
技術進展:引進國際經驗,計畫第一年邁入模組驗證
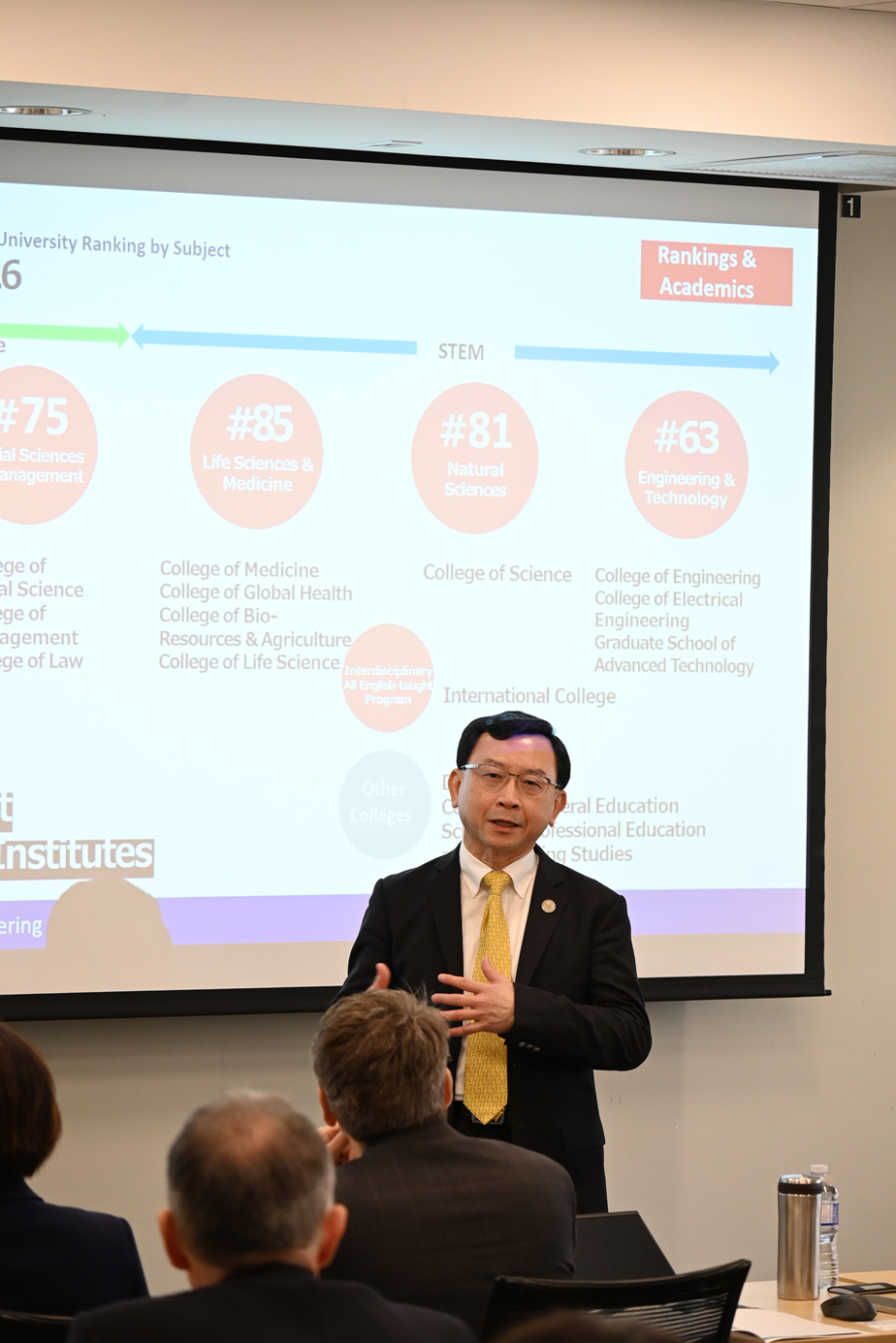
在正式交流活動中,UBC應用科學院代表、臺大工學院代表、臺北經濟文化辦事處駐溫哥華辦事處及駐加拿大代表處科技組等貴賓出席致詞,並由雙方團隊進行研究簡報與討論。UBC團隊分享智慧結構、工程監測與數位化應用等研究成果;臺大團隊則介紹此計畫於貨櫃場站載具智動化、自主化、遠端操控、感測整合、數位雙生與營運管制中心規劃等面向的推動進展。
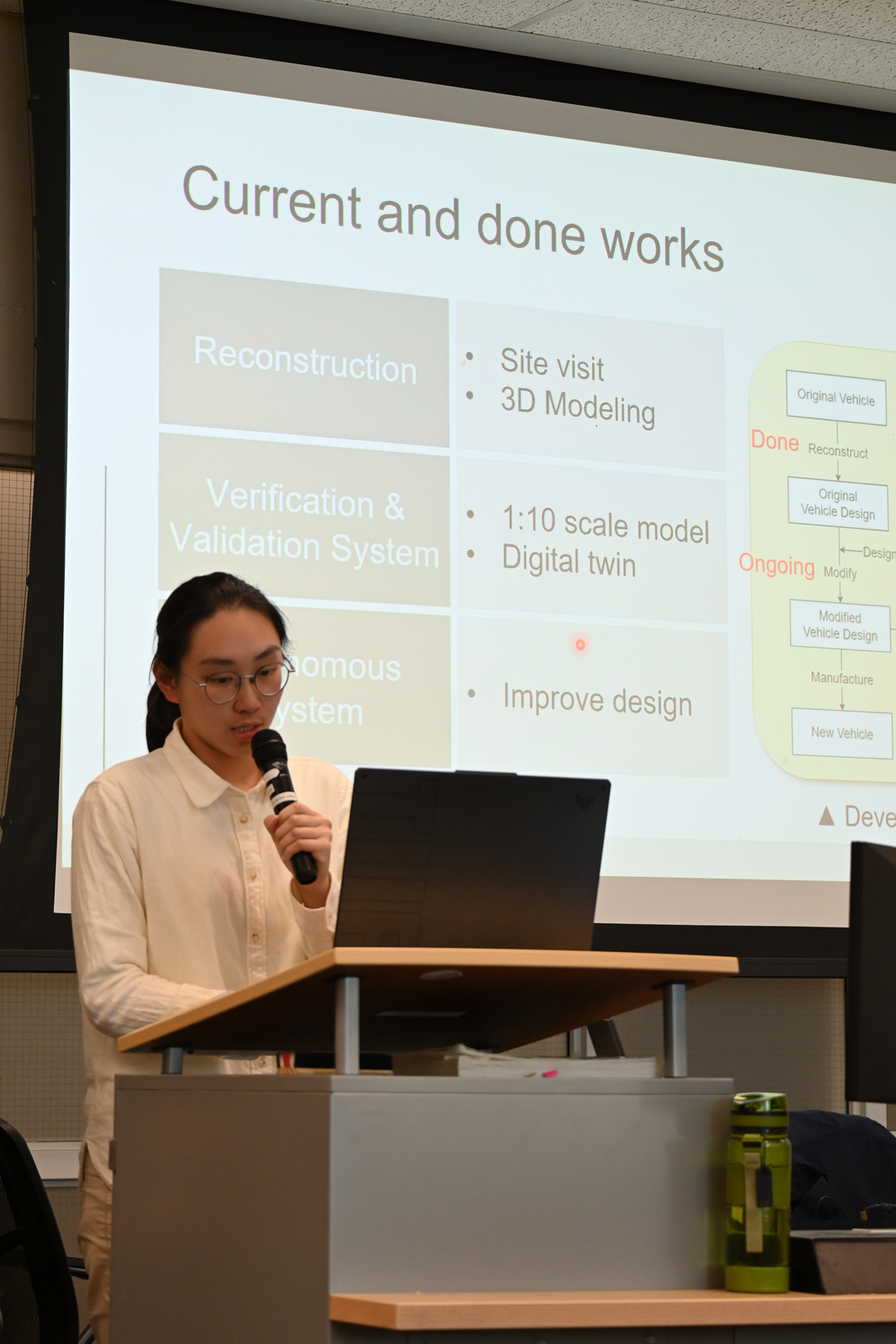
這項國科會計畫為期3年,目前執行至第一年,並由產業合作夥伴「辰熙精密」共同推進。在第一年的執行期中,團隊已完成跨運車拆裝研究、系統需求定義、OCC營運管制中心規劃、感測器整合、安全分析及臺中港測試準備等工程化工作;並逐步建立跨運車控制與遠端操控基礎架構、RTK-GNSS/INS 與 LiDAR定位流程、多相機感知配置、跨運車3D模型還原及營運管制中心原型。整體而言,計畫已由概念規劃推進至模組驗證與系統整合階段。
未來展望:建立人才培育與技術共構的長期機制
展望後續合作,臺大工學院與 UBC 已初步規劃以學生交換方案為基礎,持續深化2校在人才培育上的連結。未來合作方向將聚焦於共同研究主題、數位雙生與場域驗證方法的共構,並持續進行港口與建設自動化的經驗交流。透過這次的跨國交流,團隊不僅拓展國際研究網絡,也為臺灣在智慧港口、自主重型載具與數位雙生技術的應用上,建立起具體且可持續發展的合作基礎。




您是網頁從1999.3.14 以來第 位使用者!
【版權所有】 本校刊著作權屬國立臺灣大學。未經允許不得以任何形式轉載。
Copyright (c) 1999 - 2001 National Taiwan University ALL RIGHTS RESERVED